 |
|
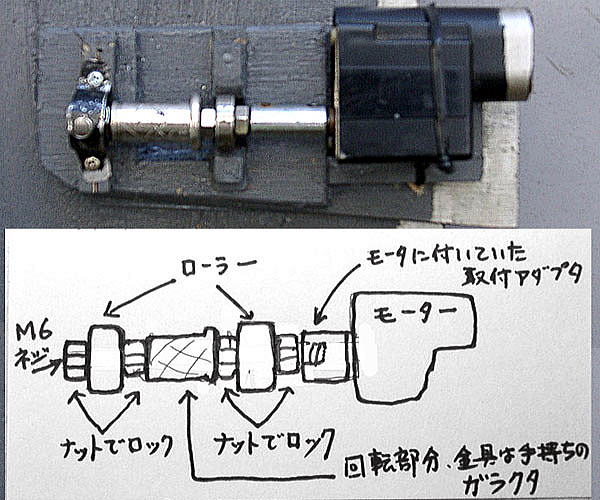
| 駆動部分 モーターは、使っていないビクセンの赤道儀のモーターを利用しました。はたしてこんな小さなモーターで60キロ以上の架台が動くのか?駄目モトのつもりで、間に合わせの板の上に図のような物を組み立て、仮止めして動かしました。このモーターは10分で1回転しますので、回転部分の直径は計算で求められますが、それすら適当で手元のガラクタで間に合いそうな物を付けました。(現状では僅かに遅い様です=実験のつもりがそのまま実用に成りました。) (かなりのトルクが必要なので単Ⅱ電池×6本が2夜程度で電圧が下がります。その場合でも追尾の前半は全体が「下がる」事に成るのでモーターへの負担が少ないので、十分実用に成ります。=と言うか、全体が「上り」に成る後半は元々このモーターでは荷が重いようで、安定感が良くありません。) |
|
 |
 |
| デジタルカメラでコリメート撮影しました。 左は20秒固定撮影。右は20秒追尾しました。中心にM57が写っています。自宅の明るい空での撮影ですが、効果は確認いただけると思います。少し補足しますとカメラの取り付け角度が違うので、星の移動方向が違っています。ただ二枚を重ねて比べると追尾したときの移動方向が日周運動方向と僅かに違うことから、極軸が合っていない可能性もあります。写真撮影するなら両軸制御するなどの必要があると思います。高倍率で惑星を見ましたが(300倍以上)モーターの振動も感じません。追尾は前半は「下り」なので問題ありませんが、後半は「上り」に成る為モーターへの負荷が大きくなり時々エラーが出ます。追尾が端まで来たらモーター側を少し持ち上げれば簡単に反対まで移動でき脱輪などの心配はありません。対象導入時に鏡筒の先端を持ち移動させると方向によりスリップしますが、「ヒャ」とする程ではありません。モーターに関しては、改善の余地が有りそうですが、現状では不満はありません。(コントローラーが熱く成りますが・・・) |
|
 |
実際に架台を載せたところ 北から見た所です。この状態が追尾の開始と成ります。左手前の「ハンドル」は一応アジャスターですが、強度考えて殆ど飾りです。右側モーターはコードやコントローラーが邪魔なので、モーターを180度反対へ取り付けたいのですが、そうすると上板の補強しているコーナーにモーターが当たるので、そのままです。(その後、他人に蹴飛ばされそうなので180度反転して取り付けました)ポンセットマウントを使った場合の架台の安定性ですが、使わないで直接地面に置いた場合と比べる安定性は少し劣ります。全体が上がることで覗く位置が上がることや、多少のギクシャク感はありますが、覗いている時の見易さはそれらを上回ります。また私の架台の場合、架台自体が重いことや、底辺の面積が大きいことが逆にプラスに成っている様で、小さな振動の収まりも早く安定感は悪くありません。 北側のローラーの位置や円盤の大きさなど一考の余地も有りそうですが、お手軽な赤道儀と言う事で、これ以上欲張れば重くコストも高く成ってしまいます。制作費はネジ、釘、ペンキなどは手持ちの物を使いましたが、合板とベアリング、ボルトやナットL型アングル、ステンレスのレール等で一万円以下で出来ました。(モーターは別)工具も安物のジクソーとドリルに日曜大工程度の物で十分ですから、お気軽です。 |
| 04.12月までに実際に運用して気づいた事。 完成当初は、追尾してくるだけで満足でしたが、その後欲が出て不満や問題点が出てきました。一つはモーターのトルク不足の為、追尾の後半(架台を押し上げる状態に成る)の追尾が不安定。モーターと接触するレールに貼った「滑り止め」が、数回で切れたり伸びたりすると言う問題。また可動部を「円径」で作っていますが、本来は円柱を斜めにカットした断面なので、楕円の様な形にしないといけない。その為、極軸が正確に合っていない赤道儀と同じで赤緯方向へのエラーが結構大きい等、主にモーター周辺に集中しています。(その後さらに改造。近く2号機を製作予定) |
|